From the perspective of the overall structure of the
rotary packing machine , there are mainly two types of horizontal packaging machines and vertical packaging machines. Horizontal packaging machines are mostly used for bag-making filling and unloading packaging, which can control the length of the bag. It is suitable for packaging all kinds of regular objects such as biscuits, moon cakes, egg yolk pie, chocolate, bread, instant noodles, medicines, and paper boxes. The material in the vertical packaging machine is conveyed from top to bottom, which is suitable for powders, granules, tablets and other objects, such as tablets, salt, etc., regardless of the shape of the package. The materials to be packaged this time are mostly in granular or powder form and are in the form of prefabricated bags. Therefore, there is no need for bag making during the packaging operation. At the same time, in order to facilitate the packaging effect, a vertical packaging machine is used.
The function of the bag feeding mechanism and the bag taking mechanism is to send the packaging bag to the first station to complete the machine clamping bag clamping action. The close cooperation of the two mechanisms is the prerequisite for ensuring the effect of this operation. In the design of the bag taking manipulator scheme in 2.2.1, the bag delivery mechanism can adopt a cam linkage mechanism or a four-bar linkage mechanism. Based on the overall layout of the packaging machine, the bag delivery mechanism uses a lift-four linkage mechanism model with a simple structure , The movement is reliable, the schematic diagram is shown in the figure:
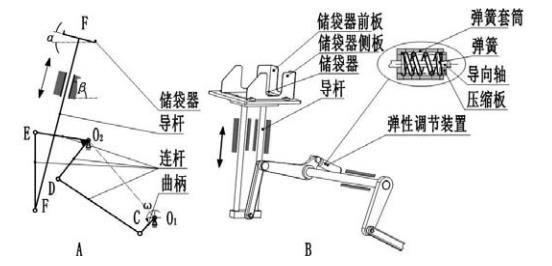
The effect of the prefabricated bag feeding mechanism (A-mechanism diagram, B-structure view) of the rotary packing machine
The figure shows the working principle of the organization. The main shaft rotates, driving the crank to rotate around O1 point, and the crank drives the four-bar linkage mechanism to realize the lifting operation of the guide rod or the bag storage device. In order to adapt to the specifications of different prefabricated bags, it can be achieved by adjusting the positions of the front and side plates of the bag holder. When the bag storage device is in the bag removal position, the suction cup absorbs the prefabricated bag. Ensure that the suction cup (or prefabricated bag) and the manipulator splint are on the same plane to complete the bag removal; when the prefabricated bag is sent to the vertical position, ensure the manipulator splint Clamp on the same plane as the machine to complete the bag delivery. When placing prefabricated bags, a stack of prefabricated bags is about 50~60mm thick. Since the position of the suction cup and the rising pole position of the bag holder remain unchanged, as the packaging process continues, the thickness of the bag stack gradually becomes smaller. In order to be able to absorb the prefabricated bag every time, the elastic adjustment device in Figure 3.3-B is designed . At the beginning, the prefabricated bag stack has a large thickness and the spring is compressed to ensure that it will not be rigidly squeezed with the suction cup to protect the suction cup; as the thickness decreases, the spring recovers slowly, always ensuring that the prefabricated bag can reach the suction nozzle of the suction cup to ensure the suction effect.
