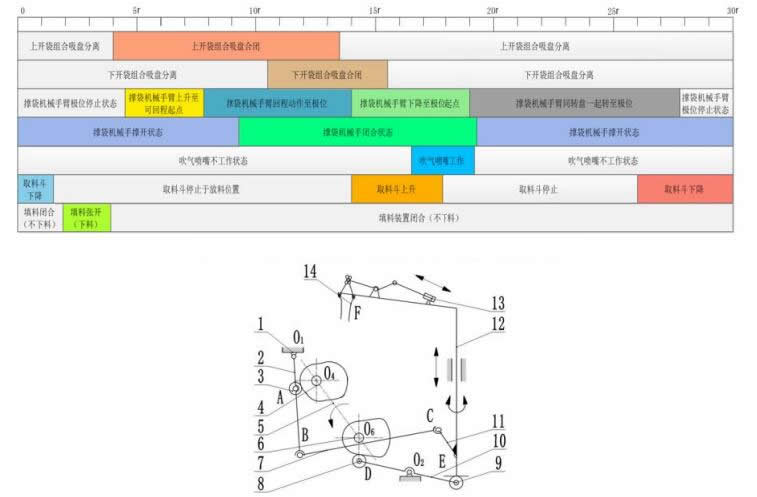
1- Rack 2- Swing rod 3- Roller 4- Bag supporting rotating cam 5- Main shaft 6 Bag lifting cam 7- Connecting rod 8- Roller 9- Roller connecting rod 10- Swing rod 11- Fixed connection Rod 12-Bag support mechanical arm 13-Cylinder 14-Bag support clamp
According to the packaging process plan and timing diagram of the
rotary packing machine , the mechanism movement diagram of the designed bag holding system is shown in the figure. The bag supporting manipulator of the bag packaging machine works in the connection process of the third and fourth stations, when the bag is expected to reach the third station, the suction cup will absorb and open the bag mouth, and the PLC system will issue instructions to the bag through the nozzle according to the sequence Blow to blow the bag to a fully inflated state. Drive the pendulum rod to swing, and the roller link hinged with the connecting rod drives the robot arm up and down, so that the holding plate of the bag holder is lowered to a certain depth in the bag with the shaft. At this time, the bag holding cylinder moves to open the pallet to hold the bag ( At this time, the suction cup stops sucking); the rotating spindle drives the swing rod to swing, the connecting rod is connected to the connecting rods (2, 11) through the ball hinges B and C, and the swing rod (2) drives the bag holding arm to rotate through the connecting rods (7, 11). Realize that the bag manipulator (the bag holder clamp keeps the bag holding state) and the bag will be synchronized with the turntable to the next station for filling and discharging. After the unloading is finished, the bag holder clamp rises and then returns to the initial position. This manipulator pallet mainly realizes two actions, namely lifting and rotating, which are three-dimensional operations. Both the lifting and rotating mechanisms use a rotating link mechanism, in which the lifting mechanism replaces the planar spindle link mechanism, and the rotating mechanism uses a spatial spindle link mechanism.
The mechanism movement diagram contains two closed kinematic chains, one is a spatial four-bar mechanism RSSR type crank and rocker mechanism composed of a frame, a swing rod (2), a connecting rod (7) and a connecting rod (11). The other is an RRLP type four-bar mechanism composed of a frame, a swing rod (10), a connecting rod (9) and an arm rod.